Определение скорости манипуляции сигналовАвтор: Степанов А. В., Матвеев С. А.
"Методы компьютерной обработки сигналов систем радиосвязи"
Все права в отношении данного документа принадлежат автору. В данном разделе рассмотрены вопросы определения скорости манипуляции сигнала V=1/t0, где t0 - длительность элементарной посылки, на основе результатов обработки видеосигнала, получаемого на выходе детектора модуляционного параметра. Хотя в общем случае получаемый видеосигнал является m-уровневым, в дальнейшем без ограничения общности мы будем рассматривать только двухуровневые сигналы, так как для решаемой задачи m-уровневый сигнал Sm(t) может быть приведен к двухуровневому S2(t) следующим образом. Всякий раз, когда происходит переход с уровня i на уровень j в сигнале Sm(t), значение сигнала S2(t) меняется на противоположное. Пусть m-уровневый сигнал Sm(nT) преобразуется в двухуровневый сигнал S2(nT) со значениями уровней 0 или 1. В этом случае преобразование производится в соответствии с рекурсивной формулой 
где = 0, если = 0, если , и , и = 1 в противном случае. = 1 в противном случае. Возможный вид получаемого таким образом сигнала приведен на рис. 1. Рис. 1 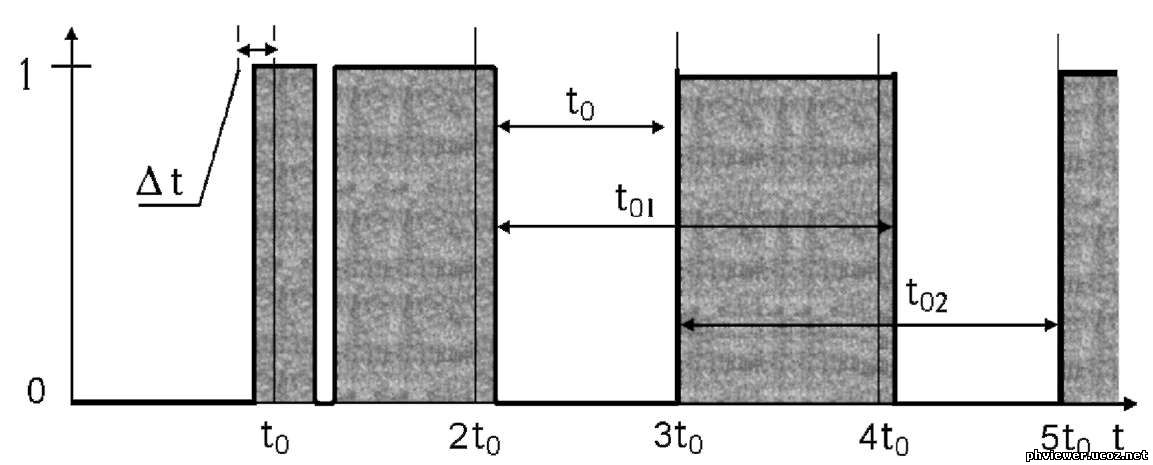 В идеальном случае при отсутствии в исходном сигнале шумов задача определения значения V решается достаточно просто. Для случая реального информационного потока, в котором представлены различные кодовые комбинации, оценка функции плотности вероятности длительностей между переходами видеосигнала с уровня на уровень будет иметь многомодальный характер с максимумами в точках t0, 2t0, 3t0 и т. д. По значениям данных максимумов значение V может быть определено с достаточно высокой точностью. В условиях же реального радиоприема при низком соотношении сигнал/шум, наличии замираний, импульсных помех и других мешающих факторов, несмотря на использование различных методов компенсации помех в приемнике и демодуляторе, выделенный видеосигнал подвергается существенным искажениям. Основными из них являются дробления внутри посылок демодулируемого сигнала и краевые искажения посылок различной природы. Наличие данных искажений обусловливает трудность правильного определения скорости манипуляции сигнала. В случае, когда моменты перехода значения видеосигнала из одного состояние в другое случайны, считается, что такой сигнал можно описать законом распределения Пуассона. Известно [39], что сигналы данного типа могут быть описаны через вероятность pn(t) n переходов видеосигнала из одного состояния в другое за время t 
где параметр k равен среднему числу переходов в единицу времени. В [38] показано, что при наличии периодической составляющей с периодом t0 в сигналах данного типа величина оценка величины k сходится к 1/t0, при  . . Таким образом, существует теоретическая возможность определения правильного значения t0 по результатам анализа искаженного помехами видеосигнала. Значение t0, например, можно установить путем обработки оценок энергетического спектра или автокорреляционной функции случайного импульсного процесса с периодической составляющей, каким и является рассматриваемый видеосигнал на выходе детектора. Вместе с тем процедуры вычисления энергетического спектра или автокорреляционной функции, как известно, требуют относительно большого объема вычислений. Например, обеспечение точности получаемых оценок 1 Бод или 1 Гц при fd = 10 кГц приведет к необходимости обработки не менее 10000 отсчетов видеосигнала для получения только одного результата вычисления оценки скорости манипуляции. Требование оперативности вскрытия модуляционных параметров сигнала обусловливает необходимость разработки более быстродействующего метода определения скорости манипуляции. Предлагаемый метод оценки скорости основывается на эмпирическом анализе возможного характера искажений посылок демодулируемого сигнала и их учете в решающем правиле определения скорости. Искажения видеосигнала типа дробления проявляются в одно- или многократном изменении полярности полезного сигнала на длительности одной посылки. Дробления в основном являются следствием действия в канале приема флуктуационных помех высокого уровня, замираний и импульсных помех. Как случайная величина импульс дробления может быть описан рядом вероятностных характеристик, точные значения которых для разных каналов связи определяются экспериментальным путем. Известна [40] экспериментальная оценка ожидаемого числа дроблений в единицу времени Nd = 0,45 x 10-3 и их средней длительности Tд = 8 мс телеграфного КВ-радиоканала со скоростью передачи сигнала V = 50 Бод. Очевидно, что для других каналов связи с другими значениями скорости передачи значения Nd и Tд будут другими. Практика обработки радиосигналов в условиях помех показывает следующее. В обычно применяемых узкополосных каналах связи дробление двоичных посылок наблюдается относительно редко. При обработке сигналов достаточно часто должны встречаться группы последовательно идущих посылок, неискаженных дроблениями, что создает реальные предпосылки для правильного определения скорости манипуляции. Вместе с тем, согласно [41], дробления являются одним из основных факторов, вызывающих ошибки при дальнейшей обработке видеосигнала. Таким образом, несмотря на относительно небольшую частоту встречаемости дроблений, необходимо осуществлять устранение возможно большего их числа в видеосигнале. Известно [42], что самым эффективным способом устранения дроблений в видеосигнале является цифровая фильтрация. Применение рекурсивных низкочастотных фильтров с частотой отсечки Fom = 1/V позволяет устранить дробления длительностью t < 1/2V при порядке фильтра m = 4...6 и дополнительном клиппировании сигнала после фильтрации. Тот же результат достигается при использовании медианного фильтра с порядком m = [fd/V]. Очевидно, что с точки зрения вычислительной сложности медианная фильтрация предпочтительнее обычной. Реализация рекурсивного НЧ-фильтра 4...6 порядка требует выполнения 10...25 операций типа умножения и 10...20 операций типа сложения на каждый отсчет сигнала. В то же время трудоемкость алгоритма рекурсивной медианной фильтрации не превышает 4...8 операций типа сложения на отсчет. Таким образом, медианная фильтрация ускоряет операцию устранения дроблений по сравнению с обычной НЧ-фильтрацией в среднем приблизительно в 10 раз. При практической реализации медианного фильтра может быть выбран алгоритм рекурсивной фильтрации, как обладающий лучшими показателями при работе в сильных импульсных шумах. Аналитически алгоритм записывается в следующем виде yi = median{yi-k, ...yi-1, xi, ..., xi+k}, где k = (m-1)/2, m - порядок фильтра, m - нечетно, median{} - операция выделения (k+1)-го элемента последовательности фигурных скобках, упорядоченной по возрастанию. Вычисление величины m осуществляется по правилу m = [fd/Vm], если m - четное и m = [fd/Vm]-1, если m - нечетное, где fd - частота дискретизации в Гц, Vm - максимально возможное значение скорости манипуляции для анализируемого сигнала. Вторым фактором, приводящим к появлению ошибок при обработке видеосигнала, являются краевые искажения, представляющие собой разницу по времени между действительным моментом смены полярности видеосигнала и идеальным ожидаемым моментом. Краевые искажения могут быть как случайными, вызываемые различного рода помехами канала приема, так характеристическими, приводящими к постоянному преобладанию длительности посылок одной полярности над посылкам другой. Характеристические искажения вызываются, как правило, особенностями работы приемопередающей аппаратуры. В реальных условиях радиоприема различные виды краевых искажений действуют одновременно, складываясь по определенным правилам. Необходимо подчеркнуть, что дополнительным фактором появления случайных краевых искажений является медианная фильтрация двоичного видеосигнала, часто приводящая при невозможности устранения дробления к «притягиванию» его к одному из краев посылки. Краевые искажения при передаче информации по радиоканалам, согласно [40], могут описываться суммой двух нормальных законов распределения: 
где - относительная величина искажения от длительности элементарной посылки - относительная величина искажения от длительности элементарной посылки  , b1+b2 = 1. Точные значения , b1+b2 = 1. Точные значения  зависят от конкретного канала связи. зависят от конкретного канала связи. Согласно [43], при таком законе распределения для основной массы случаев абсолютная величина краевого искажения относится к длительности элементарной посылки как 
Краевые искажения являются наиболее значимым фактором в снижении помехоустойчивости работы систем тактовой синхронизации по двоичным видеосигналам [44]. Таким образом, необходима разработка специальных мер их компенсации при разработке метода определения скорости манипуляции сигналов. Предлагается следующий метод определения неизвестной скорости манипуляции. На первом этапе после проведения процедуры медианной фильтрации вычисляется оценка возможного значения t0. Оценка t0 получается путем одновременного проведения двух процедур подсчета суммарной длительности двух последовательных посылок. Разница между процедурами заключается в сдвиге на один интервал перехода видеосигнала из одного положения в другое начала отсчета длительностей в процедурах. Использование сдвига на одну смену полярности позволяет быстро оценить возможное значение длительности элементарной посылки t0. Если обозначить результат работы первой процедуры как t01, а второй как t02 (см. рис.1), то при выполнении условия  можно сделать вывод о значении t0. На практике с учетом приведенного выше неравенства решение о приблизительном равенстве t01 и t02 принимается, если можно сделать вывод о значении t0. На практике с учетом приведенного выше неравенства решение о приблизительном равенстве t01 и t02 принимается, если 
где l11, l12 > 0, - некоторые пороговые значения, определяемые ожидаемой величиной краевых искажений элементарной посылки сигнала. Так как практически результаты вычисления t01 и t02 получаются на интервале видеосигнала, включающем 4 последовательные смены полярности, расстояния между которыми приблизительно равны, то за рабочую гипотезу о значении t0 принимается величина t0 = (t01+t02)/4 Такой подход к оценке значения t0, основанный на суммировании длительностей двух последовательных посылок, позволяет производить взаимную компенсацию временных преобладаний посылок либо флуктуации их длительностей, вызванных деформацией границ посылок под воздействием шумов, при которых «удлинение» одних посылок компенсируется «укорочением» других. На втором этапе после получения первичной оценки t0 проводится проверка правильности вычисления данного значения длительности элементарной посылки. Процедура проверки истинности оценки t0 также основана на вычислении длительности t1, между двумя подряд идущими сменами полярности и сравнении полученных результатов с ожидаемыми значениями. Так, при правильно принятом решении о значении t0 распределение возможных результатов вычисления будет иметь характер многомодального закона со значениями мод в точках 2t0, 3t0, 4t0 и т. д. Наличие мод высоких порядков обусловлено возможными сериями однополярных посылок. При незначительном для общего объема выборки количестве дроблений значение первой моды будет лежать в точке 2t0. Наиболее часто должны встречаться результаты оценок длительности следующего вида: Количественно выражение «наиболее часто» определяется по критерию Количественно выражение «наиболее часто» определяется по критерию  5 5
где 0 < p < 1 является пороговым значением, а— оценка вероятности соответствия t1 ожидаемым значениям. Полученное значение длительности t1 считается соответствующим предварительной оценке t0 при выполнении одного из следующих неравенств где l12, l22, l13, l23, l14, l24 - пороговые значения, определяемые характером краевых искажений двукратных, трехкратных и четырехкратных посылок. Все результаты вычисления t1 запоминаются. Значения t1, удовлетворяющие неравенству t1/4t0>l24, при вычислении не учитываются. Если на выборке N длительностей оценка не учитываются. Если на выборке N длительностей оценка удовлетворяет условию удовлетворяет условию , гипотеза о первоначальной оценке значения t0 считается верной, а значение t0 корректируется по правилу , гипотеза о первоначальной оценке значения t0 считается верной, а значение t0 корректируется по правилу
где n4, n3 и n2 - количество оценок t1, удовлетворяющих условию приема серии из соответственно четырех-, трех- и двукратных однополярных посылок, ti4, ti3, ti2 - значения полученных оценок. Если в результате проведенных действий выполняется условие р^b < р** (0 < р** < р* — пороговое значение), осуществляется возврат на этап получения первичной оценки t0. При выполнении условия осуществляются дополнительный набор N результатов вычисления длительностей t1 и соответствующая коррекция оценки осуществляются дополнительный набор N результатов вычисления длительностей t1 и соответствующая коррекция оценки . Если и после проведения дополнительной проверки . Если и после проведения дополнительной проверки , осуществляется возврат на этап получения первичной оценки t0. , осуществляется возврат на этап получения первичной оценки t0. Рекомендуемые значения параметров l12, l22, l13, l23, l14, l24, p**, p*, N рассмотренного алгоритма, полученные экспериментальным путем для сигналов со скоростями манипуляции от 50 до 1200 Бод при соотношении сигнал/шум от 1 до 8 дБ, приведены в табл. 1. Таблица 1 Обозначение параметра | l11 | l21 | l12 | l22 | l13 | l23 | l14 | l24 | p** | p* | N | Значение параметра | 0.8 | 1.2 | 0.8 | 1.2 | 0.65 | 1.35 | 0.5 | 1.5 | 0.5 | 0.4 | 50 |
Описанный алгоритм определения скорости манипуляции в виде блок-схемы представлен на рис. 2. Рис. 2 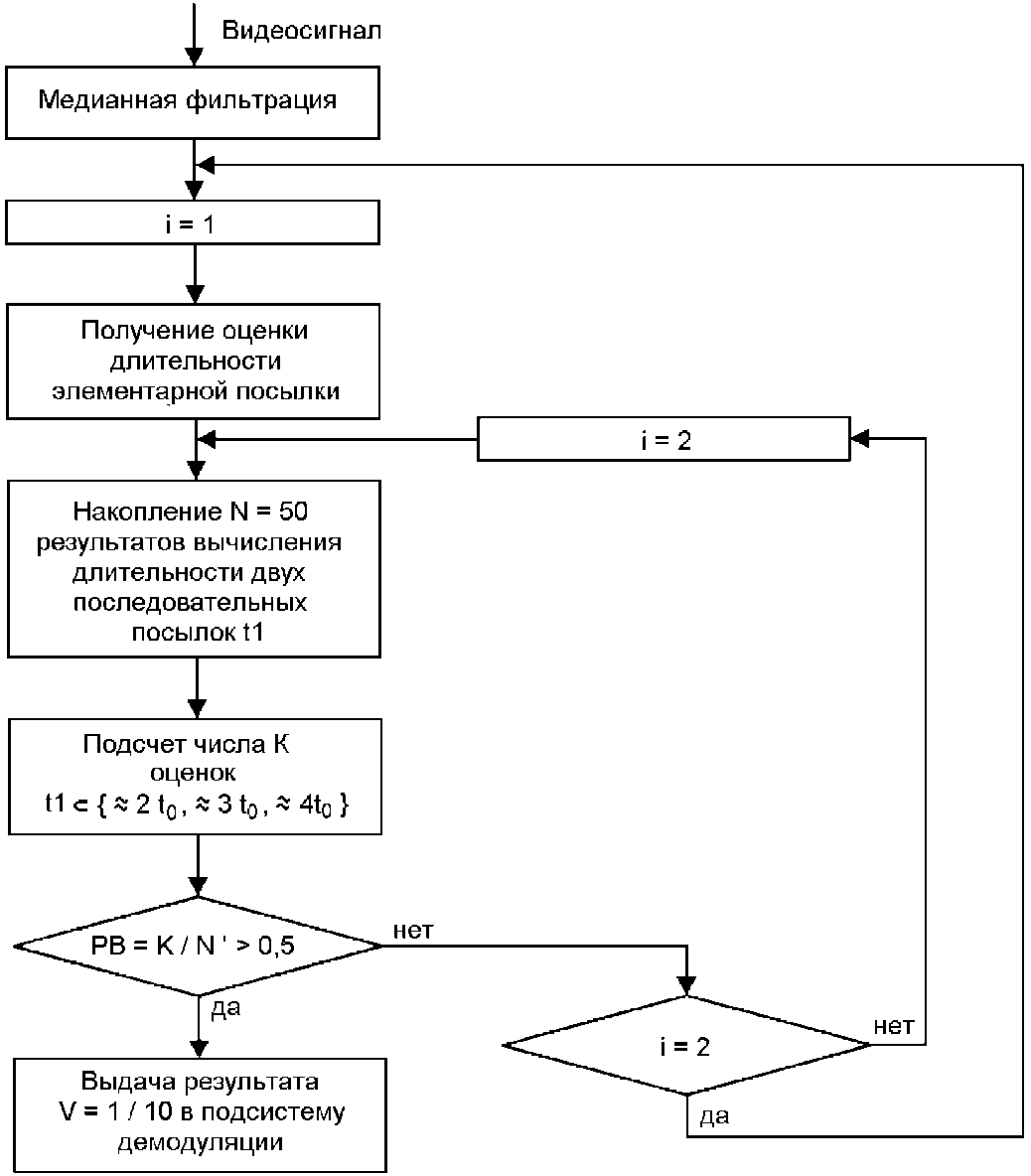
Для оценки продолжительности процедуры определения скорости необходимо определить возможный объем выборки анализируемого сигнала. Предположим, без потери общности, что весь объем обрабатываемого видеосигнала составляют серии от одной до четырех элементарных посылок одной полярности и что на пять переданных посылок приходится в среднем две смены полярности видеосигнала. Данные условия хорошо согласуются с особенностями первичных телеграфных кодов, часто применяемых на различных радиолиниях. Тогда, при требуемом для работы одного цикла алгоритма определения скорости числе смен полярности - 50, необходимо проанализировать видеосигнал, состоящий приблизительно из 125 элементарных посылок, что при fd = 10 кГц и скорости манипуляции V = 1200 Бод составит порядка 1000 отсчетов (0,1 с), а при V = 40 Бод требуемый объем составит около 30000 отсчетов (3 с). Следует отметить сравнительно небольшой объем операций при вычислении t0, причем оценка длительности посылки формируется практически сразу после завершения накопления выборки. Так как время вычислений с использованием современных вычислительных средств в приведенном методе существенно ниже указанных временных затрат, можно сделать вывод о том, что метод позволяет определять скорость манипуляции сигналов в диапазоне от 40 до 1200 Бод за 0,1...3 с. Список литературы: Левин Б. Р. Теоретические основы статистической радиотехники. Книга 1. М: Сов. Радио, 1974.Френке Л. Теория сигналов. - М.: Сов. Радио, 1974.Пуртов Л. А. и др. Элементы теории передачи дискретной информации. - М.: Связь, 1972.Туров В. С. и др. Передача дискретной информации и телеграфия. - М.: Связь, 1974.Быстрые алгоритмы в цифровой обработке изображений. - М.: Радио и связь, 1984.Шувалов В. П. Прием сигналов с оценкой их качества. - М.: Связь, 1979.Головин О. В. Декаметровая радиосвязь. - М.: Радио и связь, 1990.
|